
1. はじめに
この記事は、私が2025年12月にNVIDIAのロボティクスシミュレーションプラットフォーム「Isaac Sim」の開発環境をWindows 11 Pro上に構築した際の、個人的な作業記録です。
ロボットアームの制御からAIのトレーニングまで、Isaac Simは非常に多機能ですが、その分、環境構築には多くのステップが必要でした。将来、自分自身が環境を再構築したり、同様のセットアップを行う方の参考になったりすればと思い、手順を記録として残しておきます。
2. 私の構築環境
私が今回シミュレーション環境を構築したPCのスペックは以下の通りです。
- OS: Windows 11 Pro
- GPU: NVIDIA RTX 5090 32GB GDDR7
- CPU: AMD Ryzen 9 9950X3D 4.3 5.7GHz
- メモリ: 64GB DDR5 6000
- 主要ソフトウェア: NVIDIA Isaac Sim
3. 環境構築の手順
ステップ1:OSとWSLの初期設定
まず、Isaac Simを動作させるための土台となるOS環境を以下のように整えました。
1. NVIDIA Appのインストールとドライバ更新
NVIDIAの公式サイトから「NVIDIA App」をダウンロード(バージョン11.0.2.337 2025年12月現在)し、インストールしました。これにより、GPUドライバを簡単に最新の状態に保つことができます。

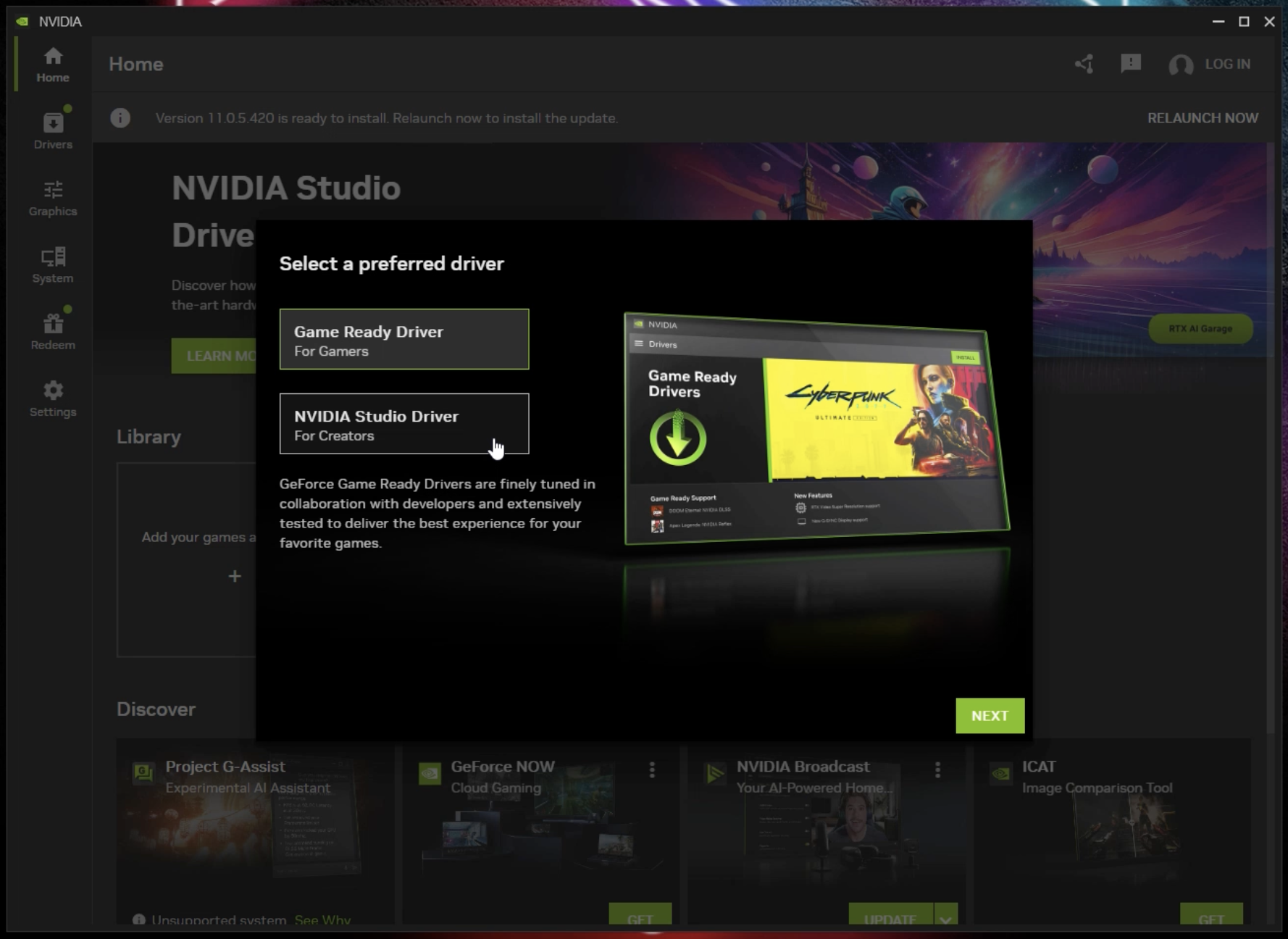
インストール中、ドライバーの種類(Game Ready DriverかNVIDIA Studio Driver)を選ぶように聞かれました。ゲームをするわけではないので、NVIDIA Studio Driverを選びました。
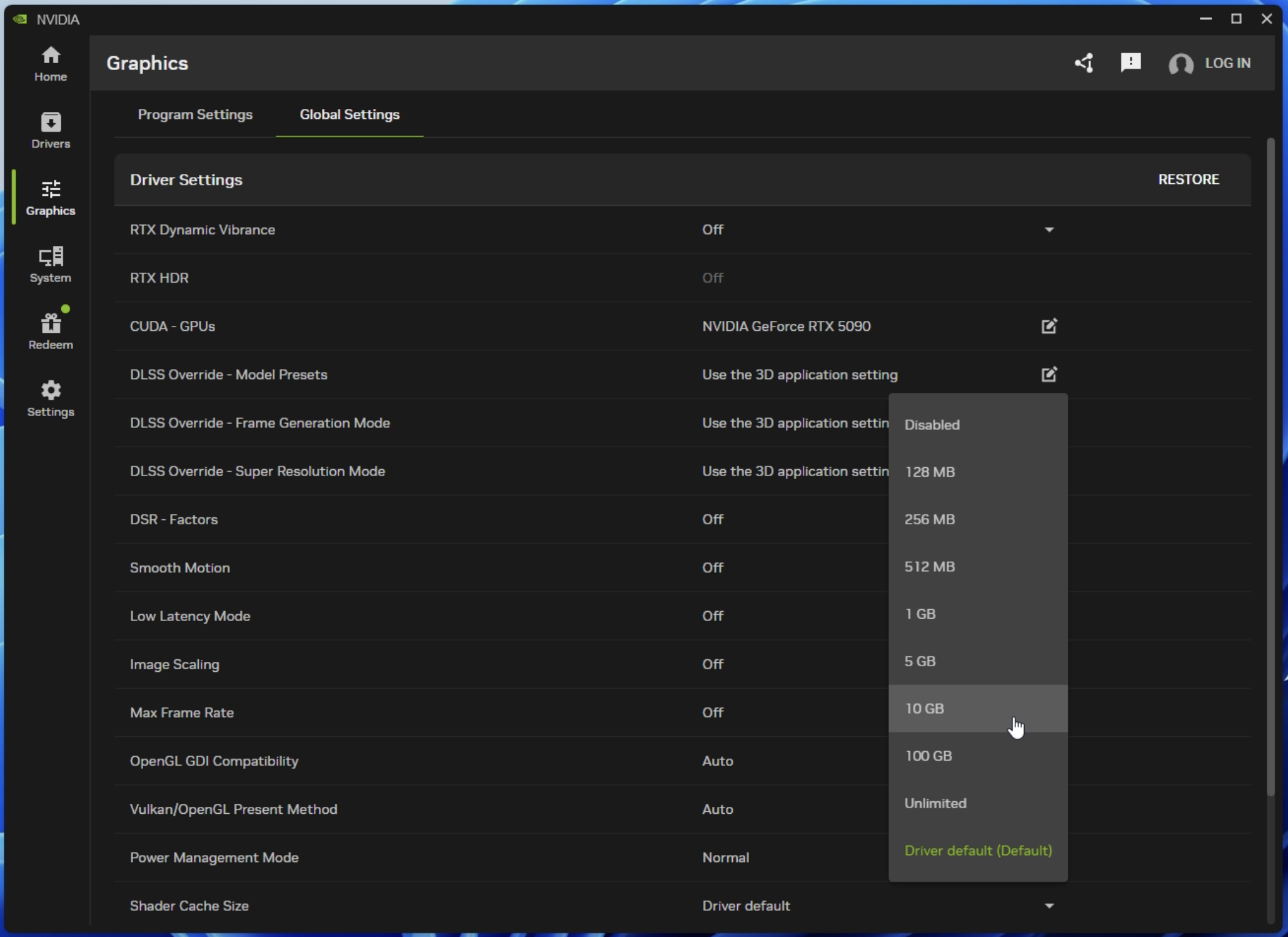
インストール後、NVIDIA Appを起動し、最新のドライバをインストールしました。また、パフォーマンス向上のため、設定からシェーダーキャッシュサイズを「10GB」に設定しました。
2. Windows Updateの実行
システムの安定性とセキュリティのため、利用可能なすべてのWindows Updateを適用しました。
3. WSL2 (Windows Subsystem for Linux 2) のインストール
Isaac Simと連携させるロボットOS「ROS2」を動作させるため、WSL2をインストールしました。
コマンドプロンプトを開き、以下のコマンドを実行しました。
> wsl --install
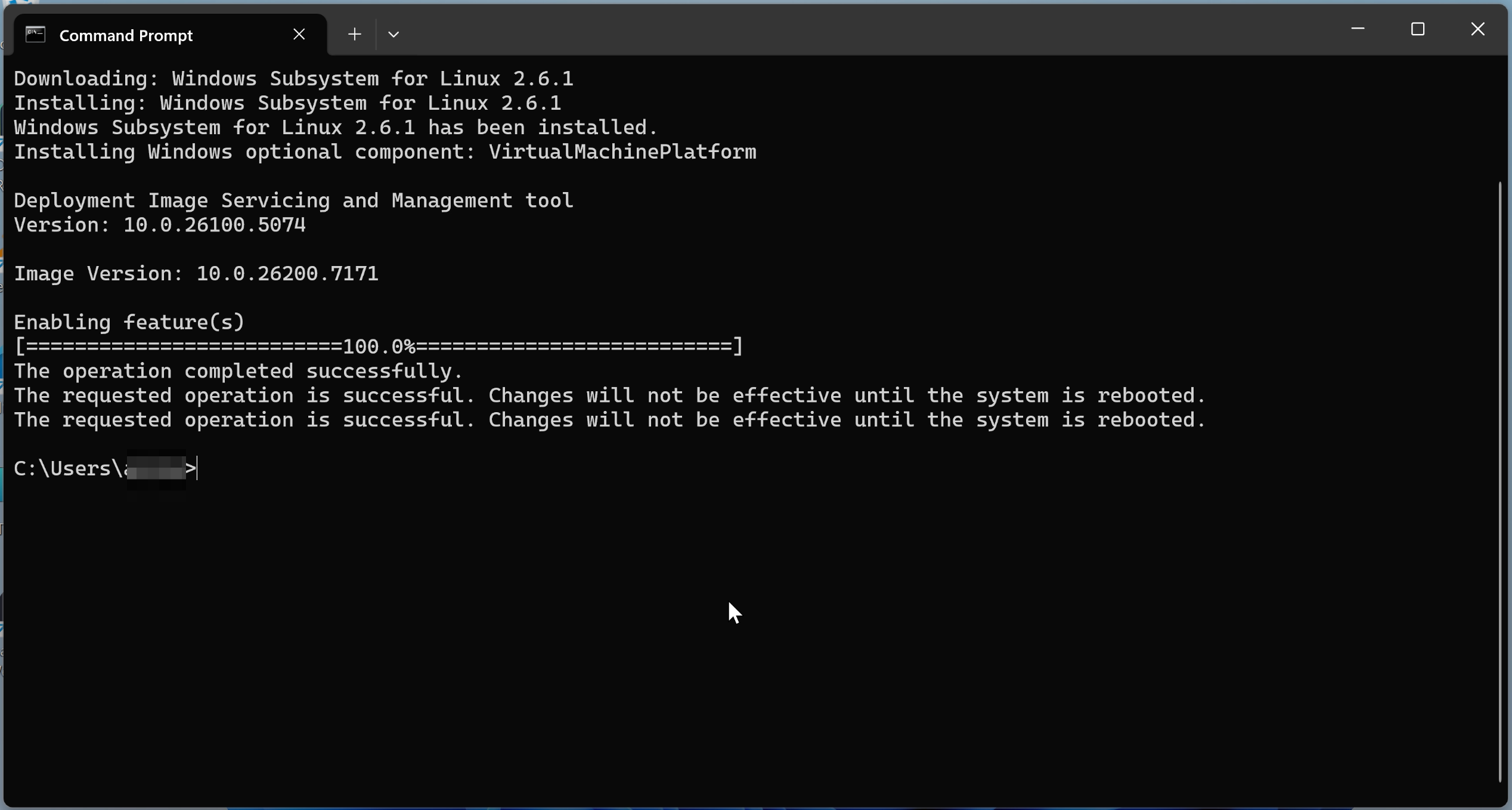
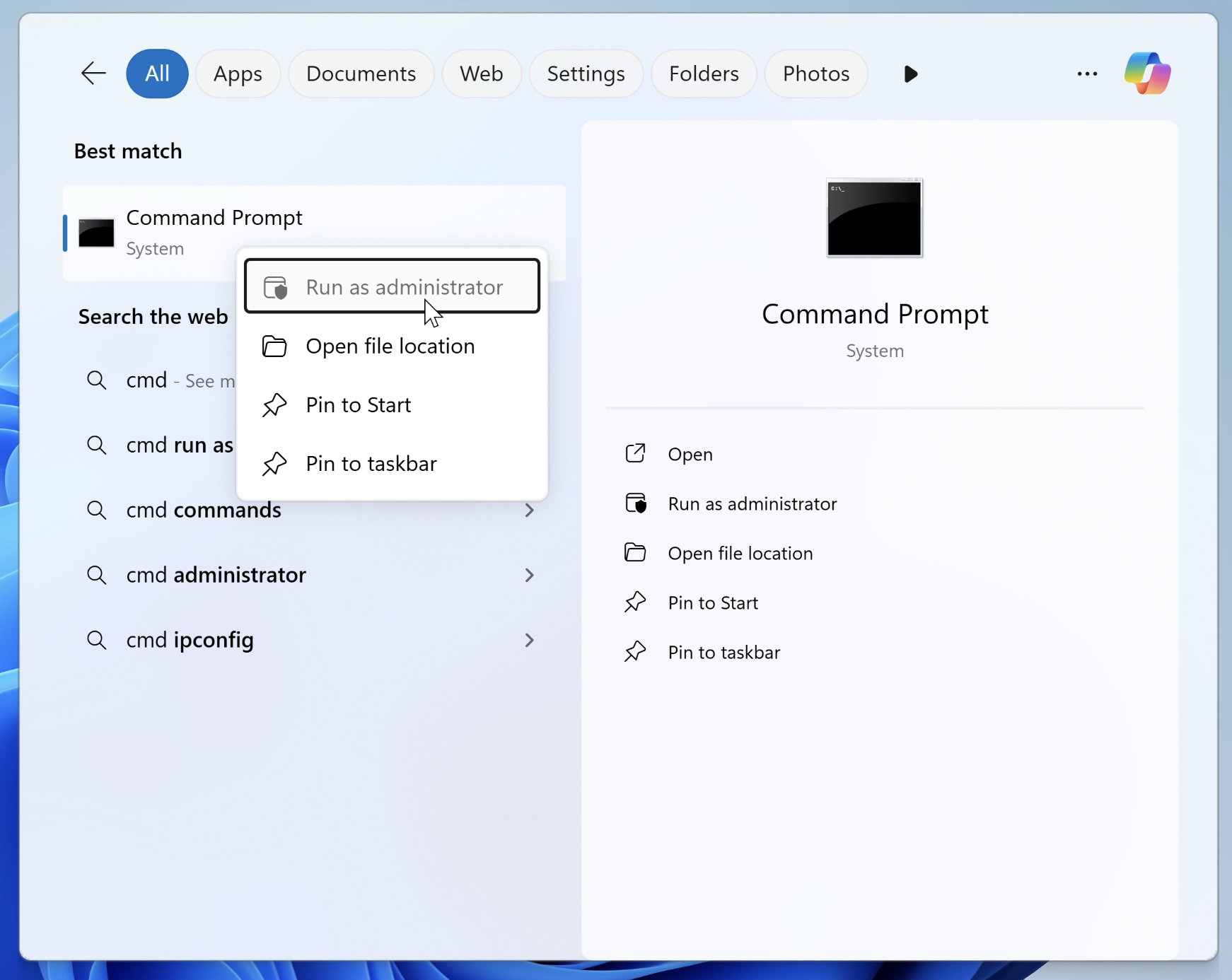
インストール完了後、PCを再起動し、管理者権限で再度コマンドプロンプトを開きました。
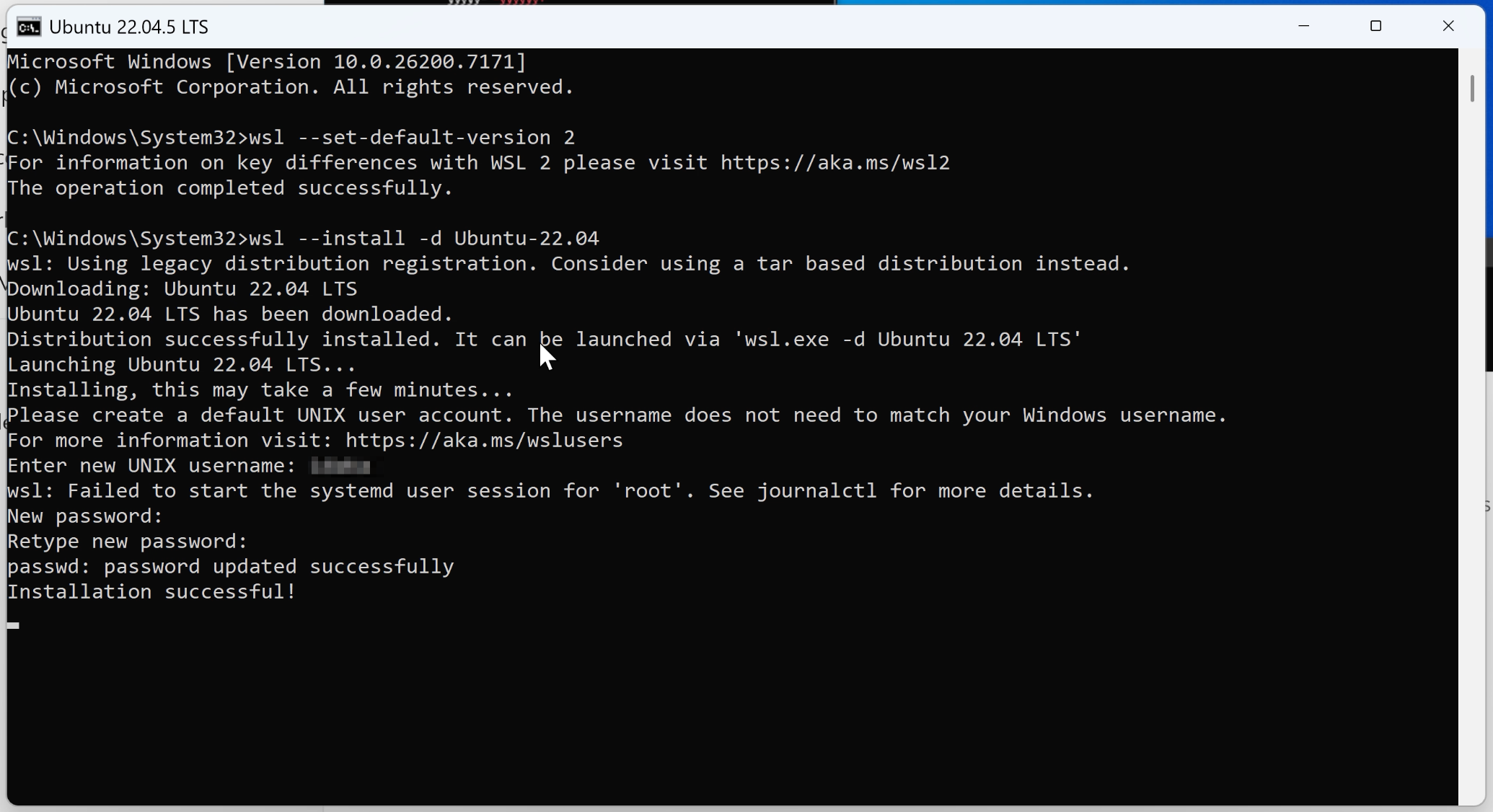
WSLのデフォルトバージョンを2に設定し、ROS2 Jazzyと相性の良いUbuntu 22.04をインストールしました。途中、Ubuntuのユーザー名とパスワードを設定しました。
> wsl --set-default-version 2
> wsl --install -d Ubuntu-22.04
ステップ2:NVIDIA Isaac Simのインストール
次に、Isaac Sim本体をインストールしました。
1. CUDAバージョンの確認
コマンドプロンプトでnvidia-smiコマンドを実行し、Isaac Simと互換性のあるCUDAバージョンがインストールされていることを確認しました。(このコマンドは先ほどのNVIDIA Appのインストールで同梱されています)
> nvidia-smi

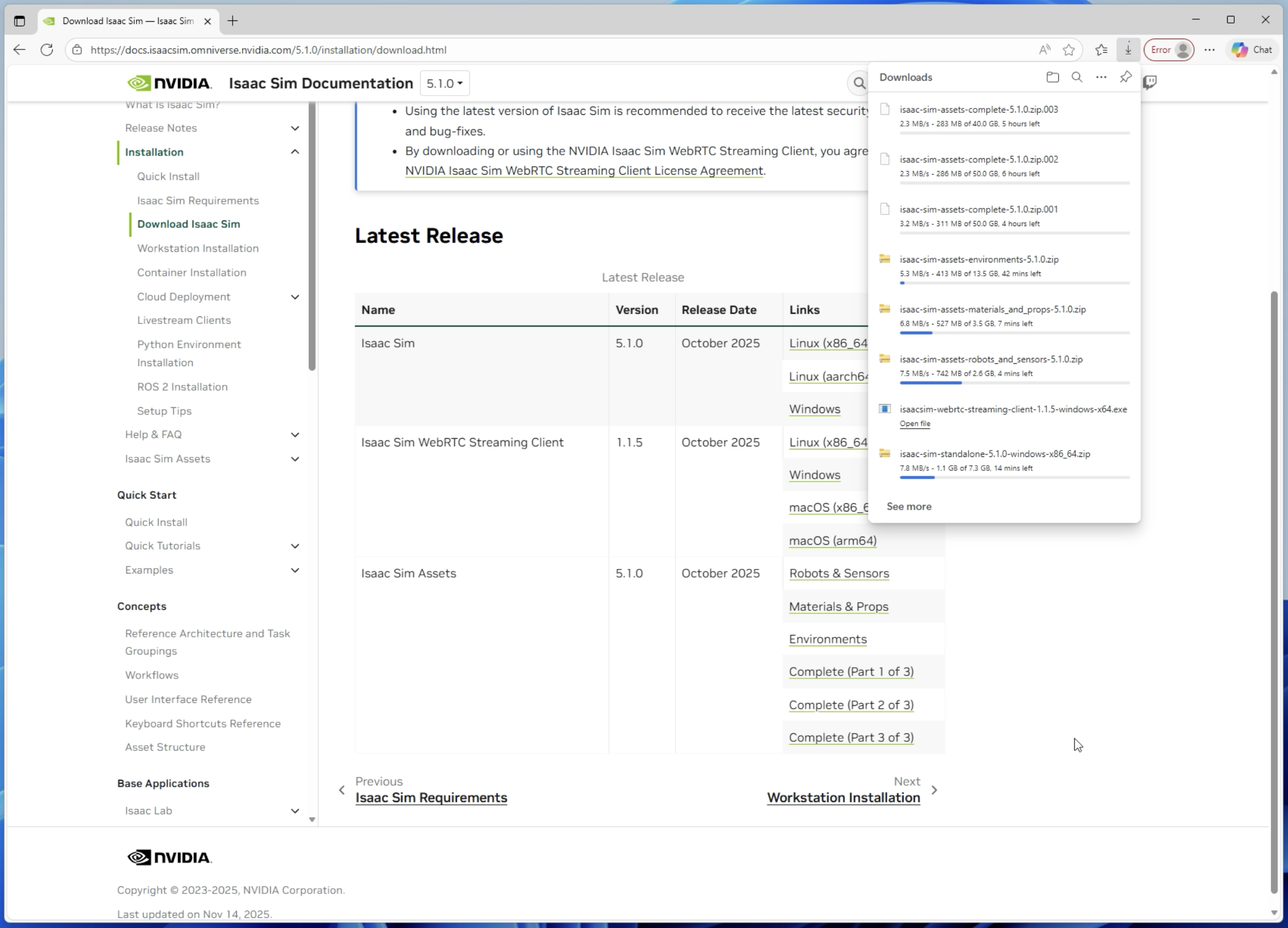
2. Isaac Simのダウンロード
NVIDIA Isaac Simの公式サイトから、以下のコンポーネントをダウンロードしました。
- Isaac Sim 本体 バージョン5.1.0
- Compatibility Checker (互換性チェッカー)
- Isaac Sim Assets (サンプルアセット)
- Isaac Sim WebRTC Streaming Client (任意)
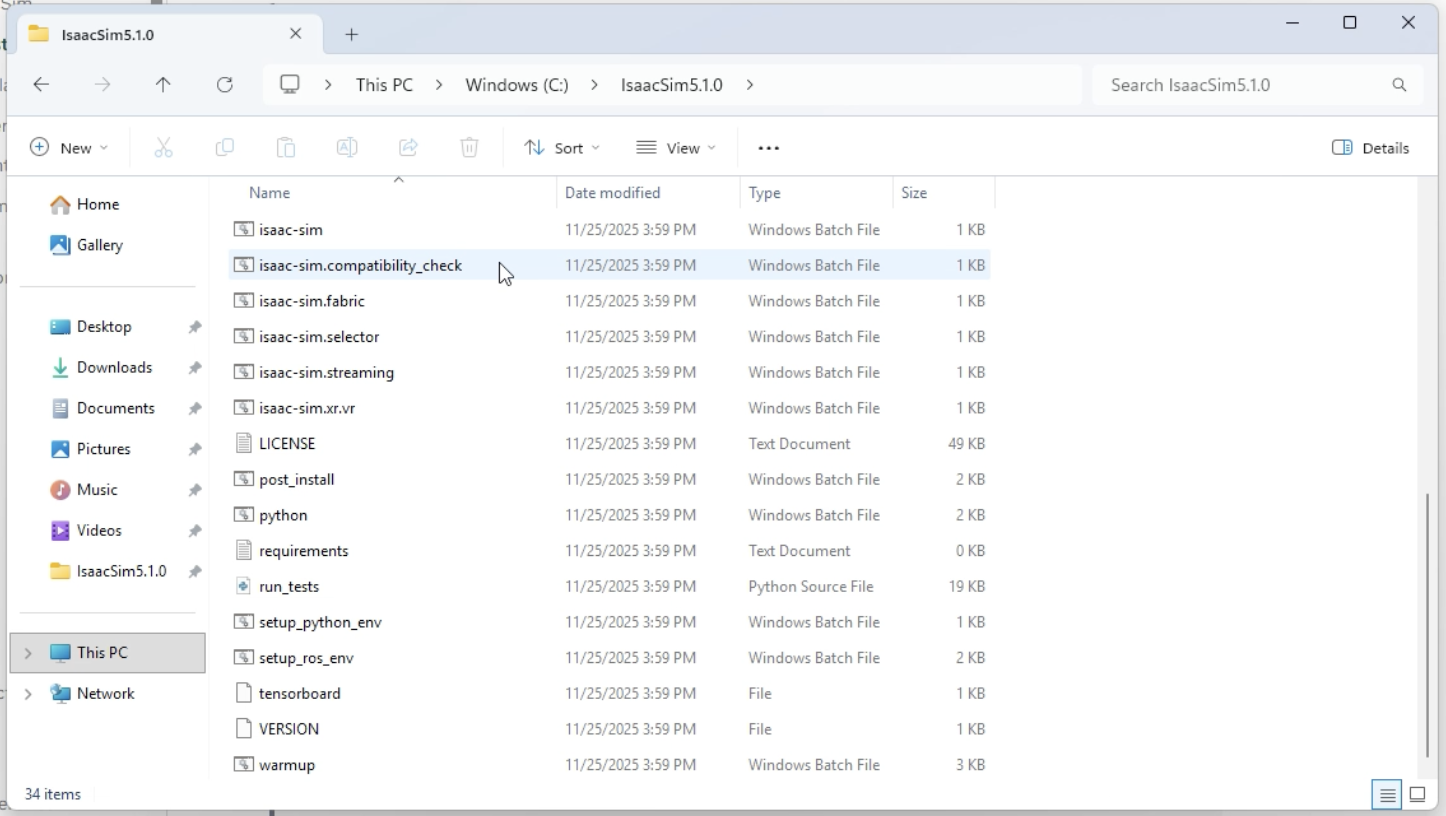
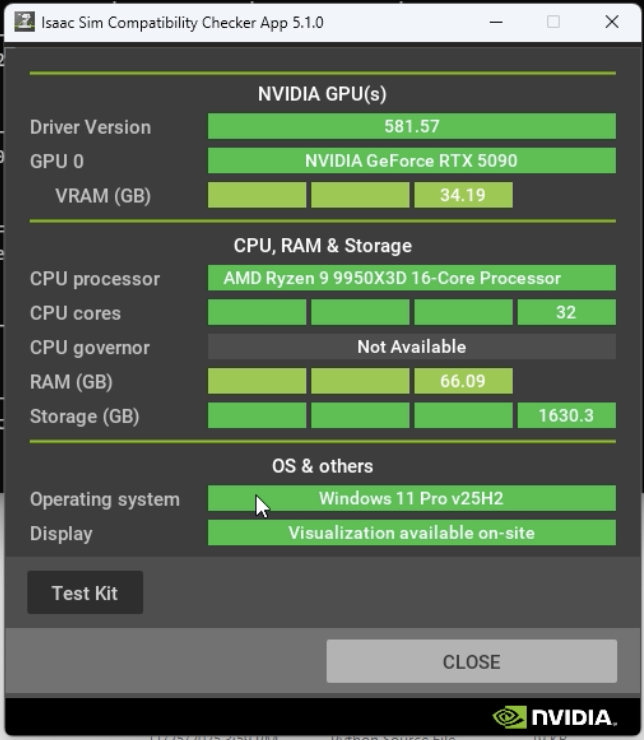
3. 互換性チェッカーの実行
解凍したフォルダ内にあるissac-sim.compatibility_check.batを実行し、使用しているPCがIsaac Simの動作要件を満たしているか確認しました。
それぞれ特に問題なく、このまま進めてよいことがわかりました。
4. シンボリックリンクの設定
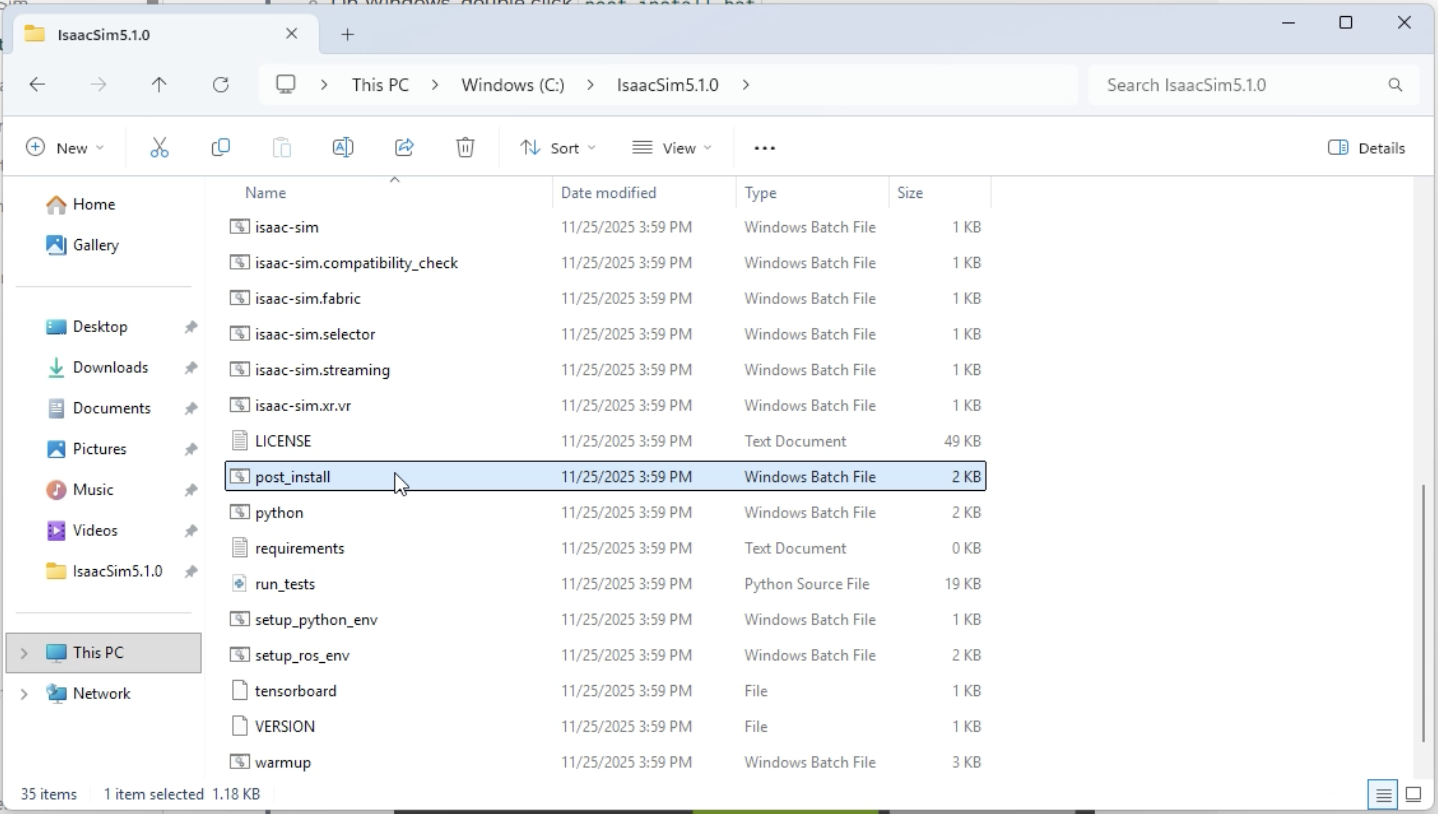
チュートリアルなどで必要となるシンボリックリンクを作成するため、post_install.batを実行しました。
5. Isaac Simの起動
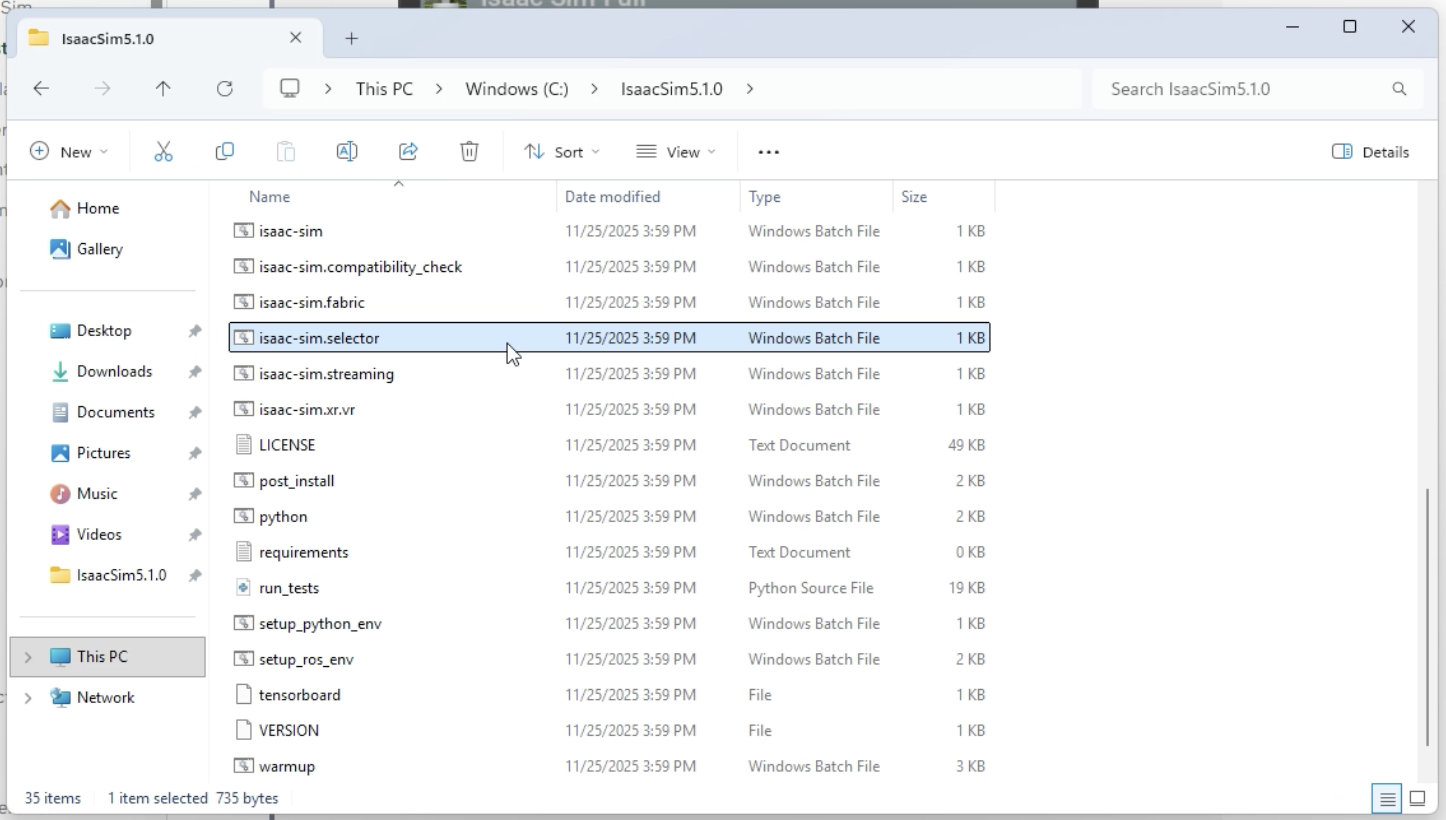
isaac-sim.selector.batをダブルクリックして起動ランチャーを開きました。
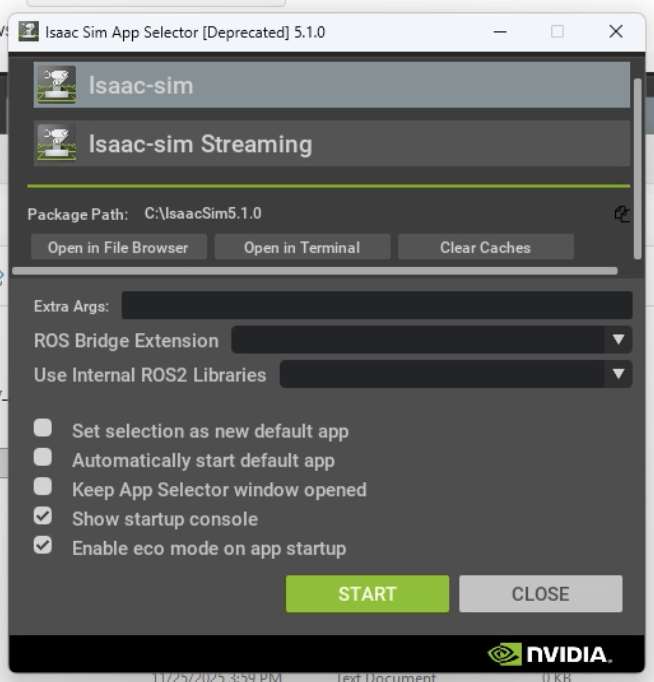
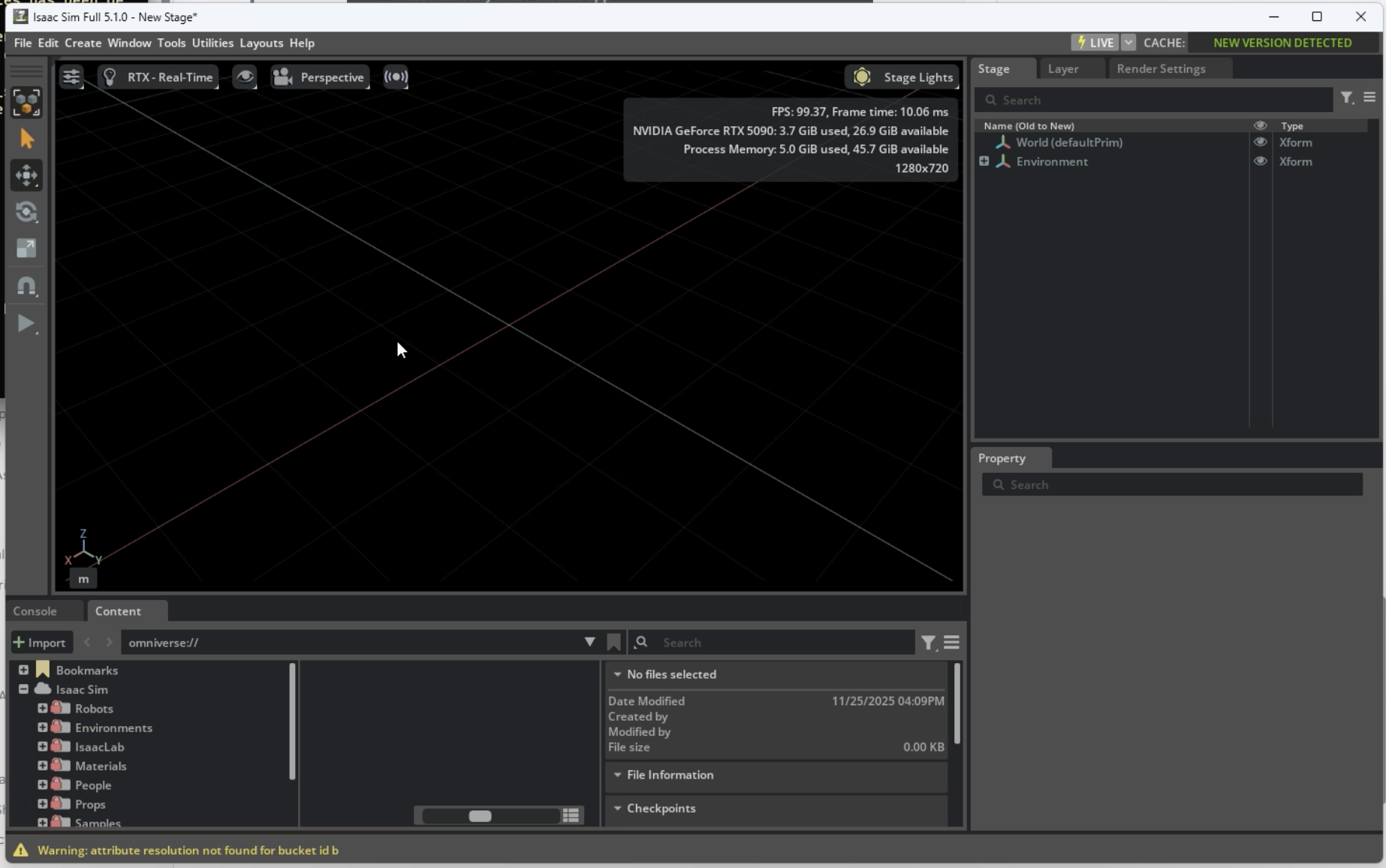
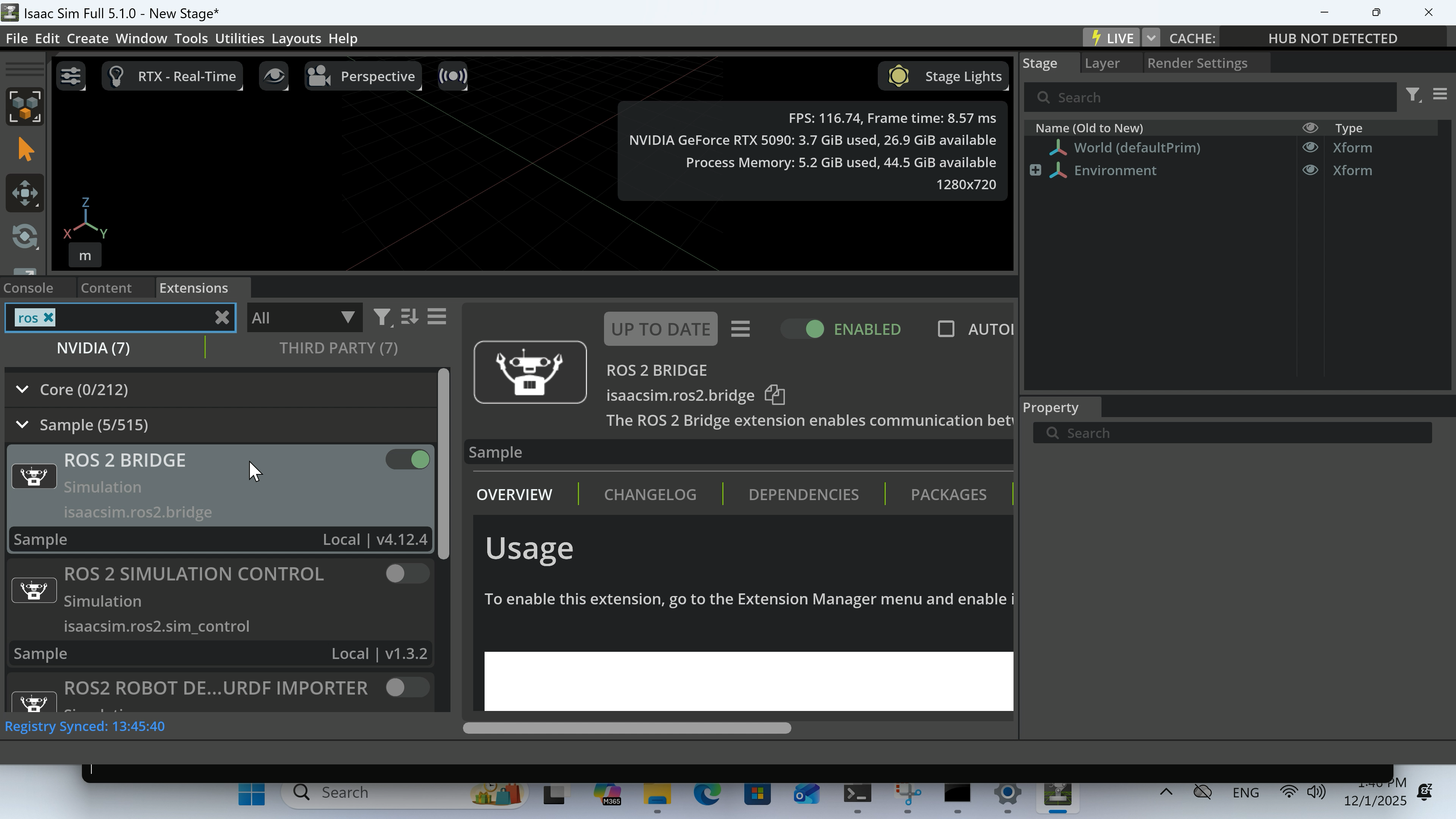
"isaac-sim"を選択し、「Start」をクリックすると、Isaac Simが起動します。初回起動は少し時間がかかりました。
無事に起動すると、以下のような画面が表示されました。
ステップ3:開発ツールのセットアップ
シミュレーション開発を快適に進めるため、以下のツールをインストールしました。
-
Visual Studio 2022 Build Tools: ROS2のカスタムノード等のビルドに必要でした。
> winget install --id=Microsoft.VisualStudio.2022.BuildTools -e
-
Git for Windows: ソースコードのバージョン管理に使います。
-
Miniconda: プロジェクトごとに独立したPython環境を管理するために導入しました。ダウンロードにはアカウントを作成する必要がありました。
-
Docker Desktop: 再現性の高い環境構築のためにWSL2をバックエンドとして使用する設定でインストールしました。
-
Visual Studio Code: メインのエディタとして利用し、以下の拡張機能をセットアップしました。
- Python (Microsoft)
- Pylance
- Docker
- GitLens
- YAML
- URDF Viewer
ステップ4 (推奨): 3D/CAD関連ツール
3Dモデルの作成や編集、CADデータの扱いのために、以下のツールもインストールしました。
- Blender: 3Dモデリングソフト。
- FreeCAD: CADソフト。
- MeshLab / 3D Viewer: 3Dモデルの確認・編集用。
4. ROS2との連携設定
今回のセットアップの核となる、ROS2との連携設定です。WSL上にインストールしたROS2とIsaac Simを接続しました。
1. WSL上へのROS2 Jazzyのインストール
WSL (Ubuntu) を起動し、以下のコマンドを順に実行してROS2 Jazzy Desktop版をインストールしました。
# パッケージリストの更新とアップグレード
$ sudo apt update && sudo apt upgrade -y
# 必要なツールのインストールとリポジトリの追加
$ sudo apt install -y curl gnupg lsb-release software-properties-common
$ sudo add-apt-repository universe
# ロケール設定 (UTF-8)
$ sudo apt install locales
$ sudo locale-gen en_US en_US.UTF-8
$ sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
$ export LANG=en_US.UTF-8
# ROS2リポジトリの追加とキーの登録
$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add
$ echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
# ROS2 Desktop版のインストール
$ sudo apt update
$ sudo apt install ros-humble-desktop
# 開発ツールのインストール
$ sudo apt install ros-dev-tools python3-colcon-common-extensions python3-argcomplete
# 環境設定スクリプトの読み込み設定
$ echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
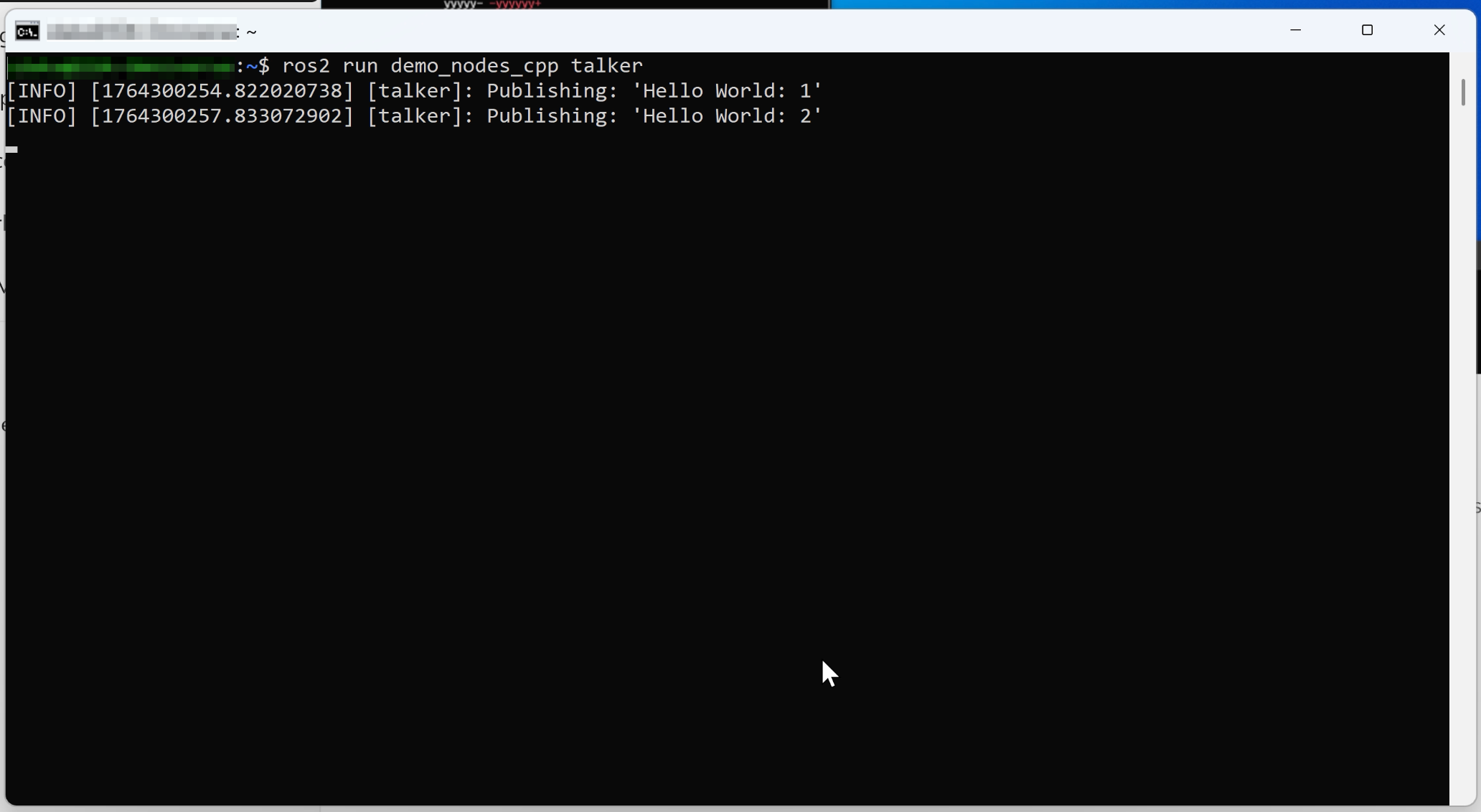
インストール後、ros2 run demo_nodes_cpp talker を実行して、"Hello World"メッセージが流れることを確認しました。
2. Isaac Sim - ROS2ブリッジの設定
WindowsとWSL上のROS2を通信させるための設定を行いました。
まず、WSLとWindowsのIPアドレスをそれぞれ確認しました。
# WSLのIPアドレスを確認
$ hostname -I
# Windows側ではipconfigコマンドなどで確認
管理者権限のコマンドプロンプトで、ポートフォワーディングルールを追加しました。
# WSL_IPとWindows_IPは調べたアドレスに置き換えます
> netsh interface portproxy add v4tov4 listenport=7400 listenaddress=$Windows_IP connectport=7400 connectaddress=$WSL2_IP
> netsh interface portproxy add v4tov4 listenport=7410 listenaddress=$Windows_IP connectport=7410 connectaddress=$WSL2_IP
> netsh interface portproxy add v4tov4 listenport=9387 listenaddress=$Windows_IP connectport=9387 connectaddress=$WLS2_IP
Isaac Sim Selectorを起動し、「Bridge」タブで以下のように設定しました。
ROS Bridge Extension:isaacsim.ros2.bridgeUse Internal ROS2 Libraries:humble

設定後、Isaac Simを起動し、Window > Extensionsからomni.isaac.ros2_bridgeが有効になっていることを確認しました。
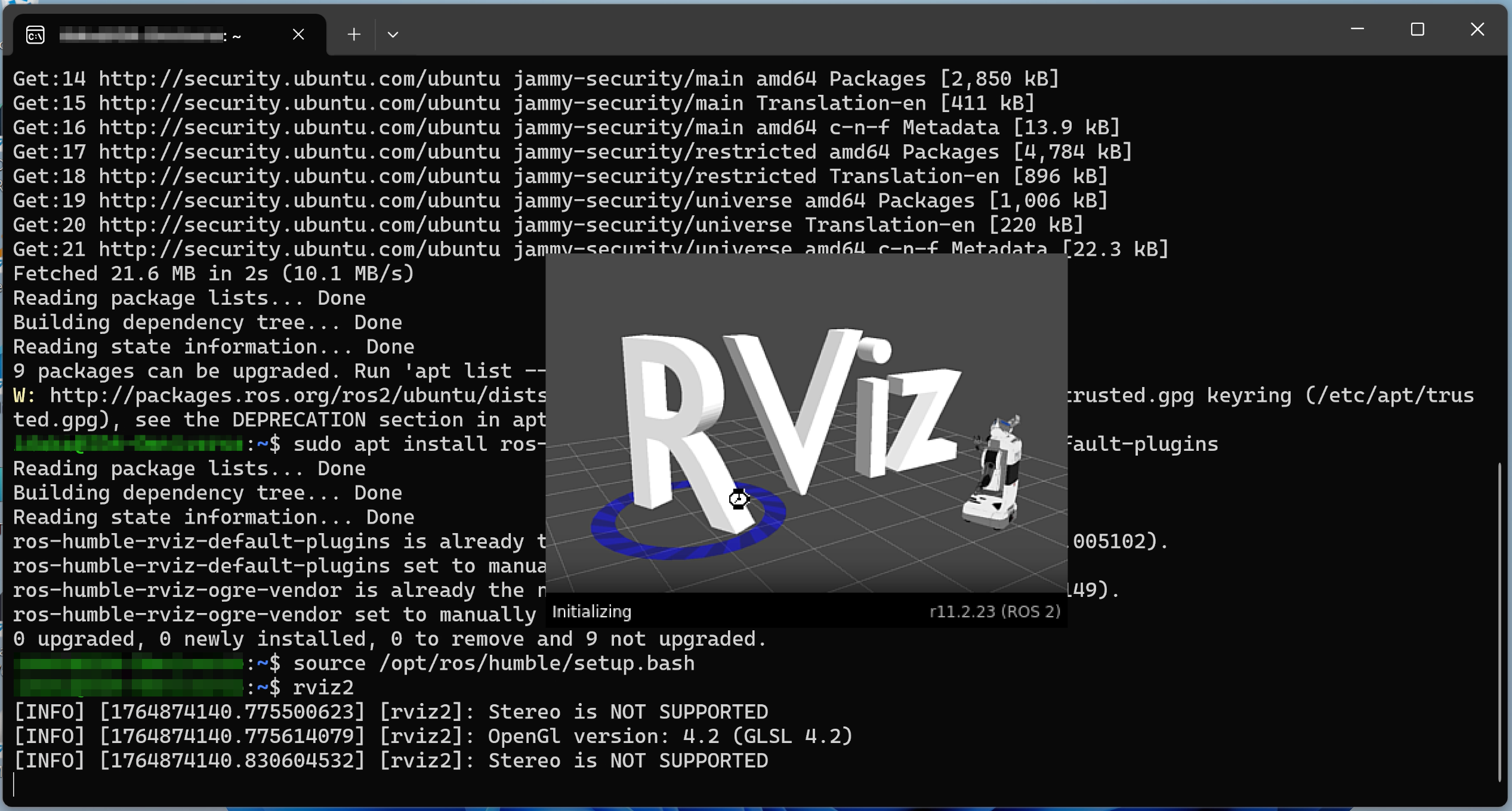
3. Rviz2のインストール
ROS2の統合3D可視化ツールであるRviz2を、WSL上で以下のコマンドを実行してインストールしました。
$ sudo apt update
$ sudo apt install ros-humble-rviz-ogre-vendor ros-humble-rviz-default-plugins
$ source /opt/ros/humble/setup.bash
$ rviz2
4. MoveIt2のインストール (ソースビルド)
高度なモーションプランニングライブラリ「MoveIt2」は、バイナリインストールがうまくいかなかったので、ソースからビルドしてインストールしました。
# ワークスペースの作成と移動
$ mkdir -p ~/ws_moveit/src
$ cd ~/ws_moveit/src/
# チュートリアルと依存リポジトリのクローン
$ git clone https://github.com/moveit/moveit2_tutorials -b humble
$ vcs import < moveit2_tutorials/moveit2_tutorials.repos
# システム依存関係のインストール
$ sudo apt remove ros-humble-moveit* # 競合を避けるため既存バイナリを削除
$ cd ~/ws_moveit
$ rosdep install -r --from-paths src --ignore-src --rosdistro humble -y
# ビルド
$ colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
# DDSの設定
$ sudo apt install ros-humble-rmw-cyclonedds-cpp
$ echo 'export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp' >> ~/.bashrc
$ source ~/.bashrc
# デモの実行
$ source install/setup.bash
$ ros2 launch moveit2_tutorials demo.launch.py
MoveIt2のデモが起動したことで、すべての連携設定が完了したことを確認しました。
Isaac Sim でのロボット検証・PoC構築をご検討の方へ
この記事のような環境構築から、実際のロボット(TM Robot・カスタムアーム等)を使った Pick & Place PoC の設計・実装 までをサポートしています。
4週間・固定価格($15,000〜$18,000) のクイックスタートパッケージもご用意しています。
5. まとめ
以上が、私が2025年12月に行ったNVIDIA Isaac Simの環境構築手順の記録です。
多くのステップがありましたが、一つ一つ着実に進めることで、無事にシミュレーション環境を構築することができました。この記録が、将来同じような環境構築を行う方の、何かの参考になれば幸いです。