
Ubuntu NVIDIA Isaac Sim 開発環境構築ガイド (2025-12版)
1. はじめに
Windows 11 ProにIsaac Simをセットアップした後、Docker上のUbuntu/ROS 2環境との連携で問題が発生しました。Isaac SimがROS 2 BridgeのPythonモジュールrclpyをロードしようとしてクラッシュする現象に悩まされ、解決に至りませんでした。
結局、Ubuntuをデュアルブートでクリーンインストールし、Isaac SimとROS 2をネイティブ環境に共存させる構成に切り替えることにしました。以下はその手順の記録です。
2. システム概要
- OS: Ubuntu 24.04
- 主要ソフトウェア: NVIDIA Isaac Sim 5.1.0, ROS2 Jazzy
- 用途: ロボットアーム等のシミュレーション、営業支援用PoC開発
3. 環境構築手順
基本的なところは、https://docs.isaacsim.omniverse.nvidia.com/5.1.0/installation/install_python.htmlを参照しました。
3.1. OS初期設定
Ubuntuのデュアルブート環境作成については、詳細な文献が多数存在するため、そちらを参照してください。
インストール中に Install third-party software for graphics and Wi-Fi hardware オプションが表示されたら、必ずチェックを入れ、NVIDIAのプロプライエタリドライバをインストールします。
インストール完了後、以下のコマンドでNVIDIAドライバとCUDAのバージョンを確認してください。
$ nvidia-smi
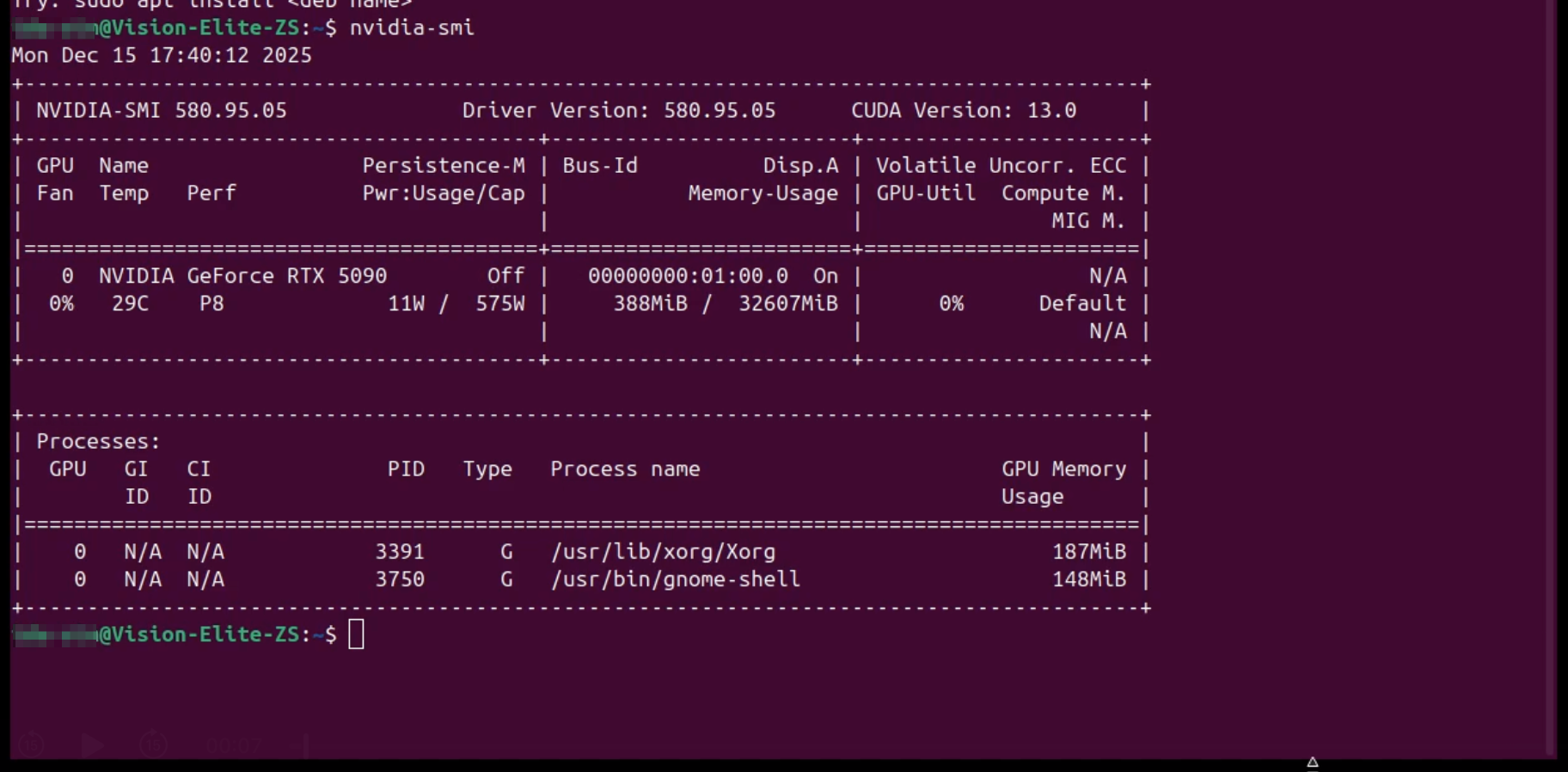
これは、NVIDIAパッケージリポジトリから提供された新しいドライバ (libnvidia-gl-580) と、既存の互換パッケージ (libnvidia-egl-gbm1) の競合が原因です。この問題を解決できず、最終的にOSをクリーンインストールする結果となりました。X11関連の設定変更は慎重にどうぞ。
3.2. MinicondaインストールおよびPython環境設定
Ubuntu標準のPythonを直接いじってしまうと、OSのシステム自体が壊れるリスクがあります。Condaを使って『仮想環境』を作ることで、万が一設定を失敗してもその環境を消すだけでやり直せるため、安全に開発できます。
$ mkdir ~/dev/
$ cd ~/dev/
$ sudo apt update
$ sudo apt upgrade
$ wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh
$ bash Miniconda3-latest-Linux-x86_64.sh
$ source ~/.bashrc
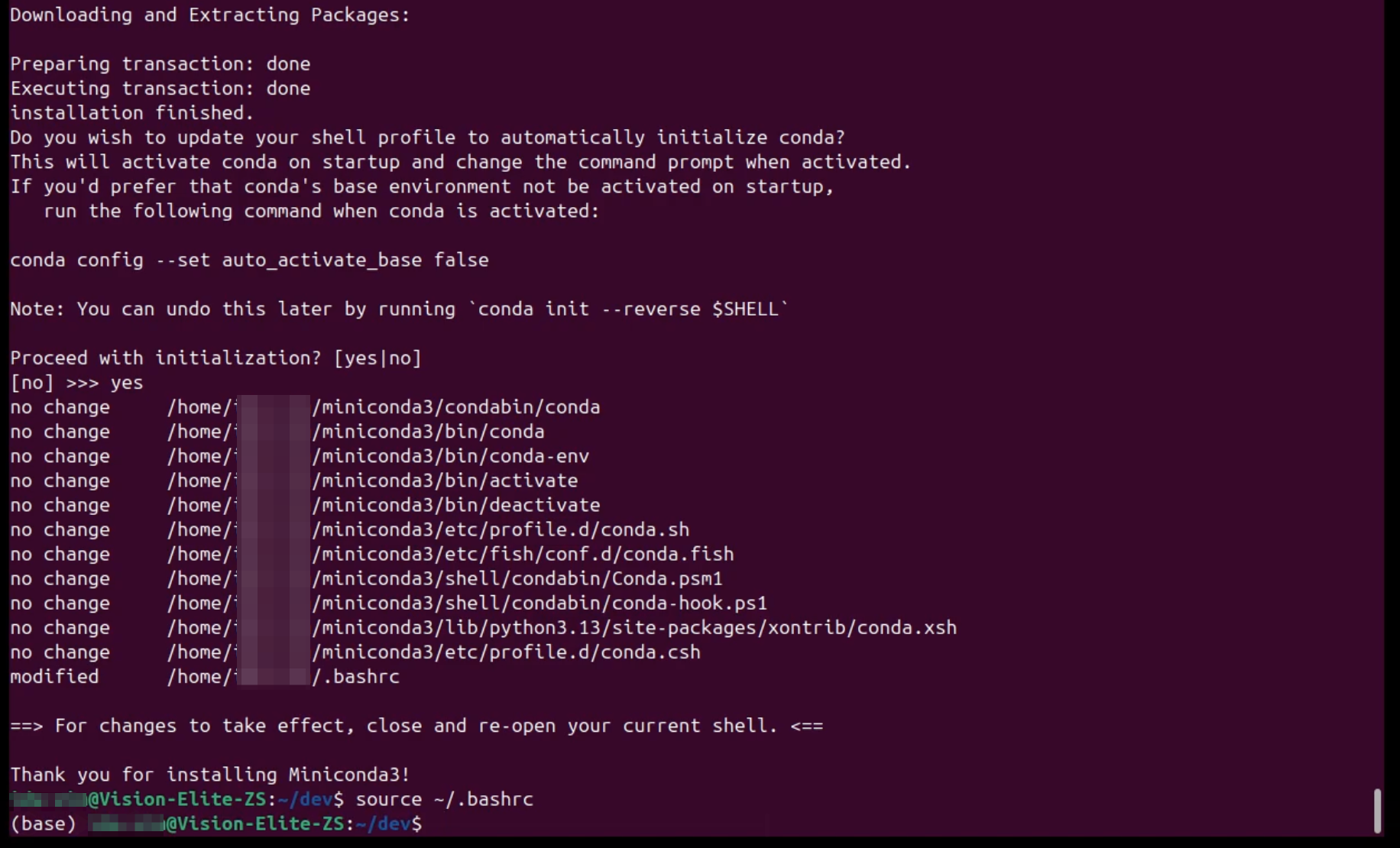
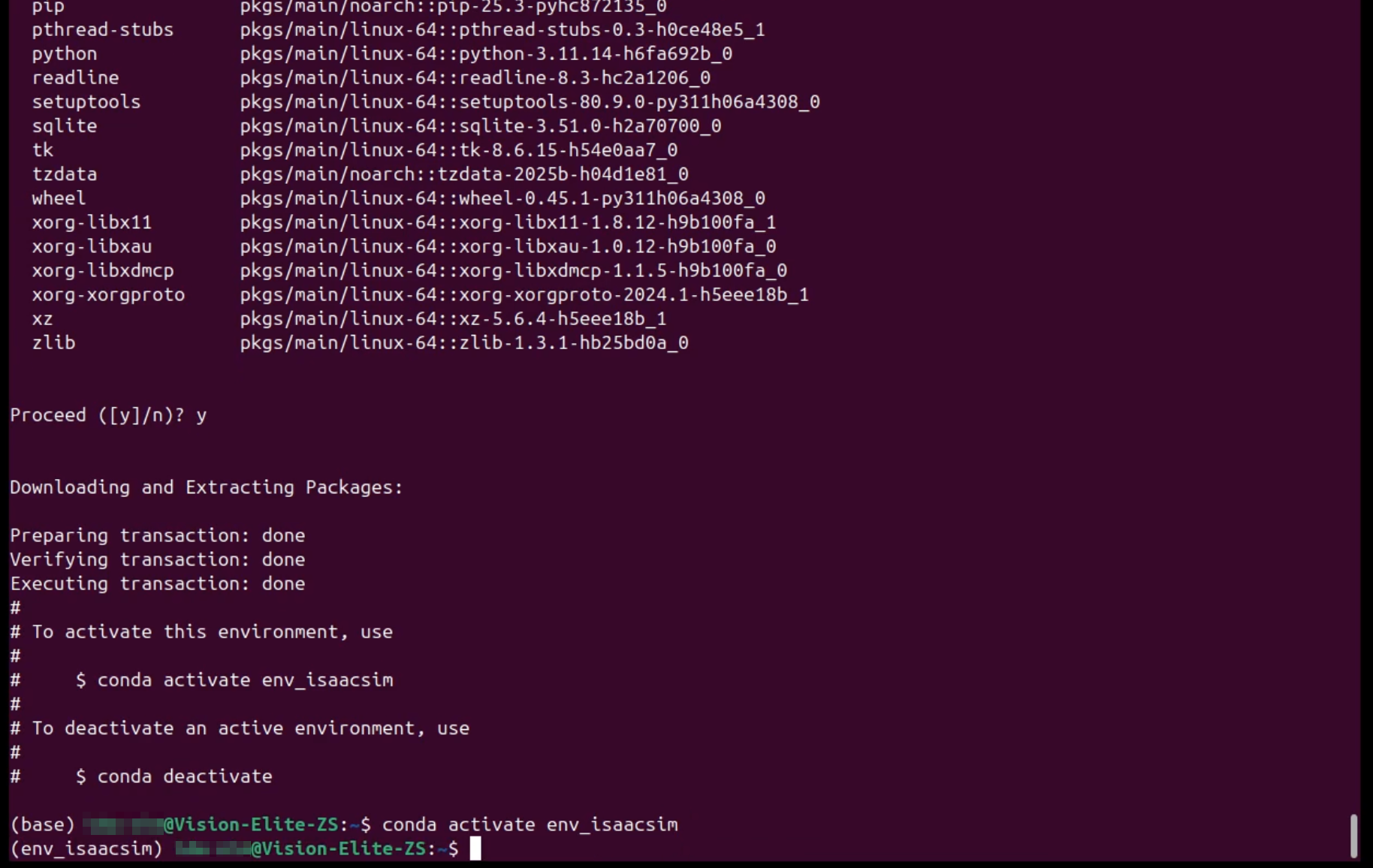
これでcondaコマンドが使えるようになります(プロンプトの頭にconda環境が表示されます。例えば(base)とかです)。次いで、Isaac Sim 5.1.0 はPythonバージョン3.1を要求するため、Isaac SimのためのPython環境を作成します。
(base) $ conda create -n env_isaacsim python=3.11
(base) $ conda activate env_isaacsim
(env_isaacsim) $ pip install --upgrade pip
3.3. Isaac Sim インストール
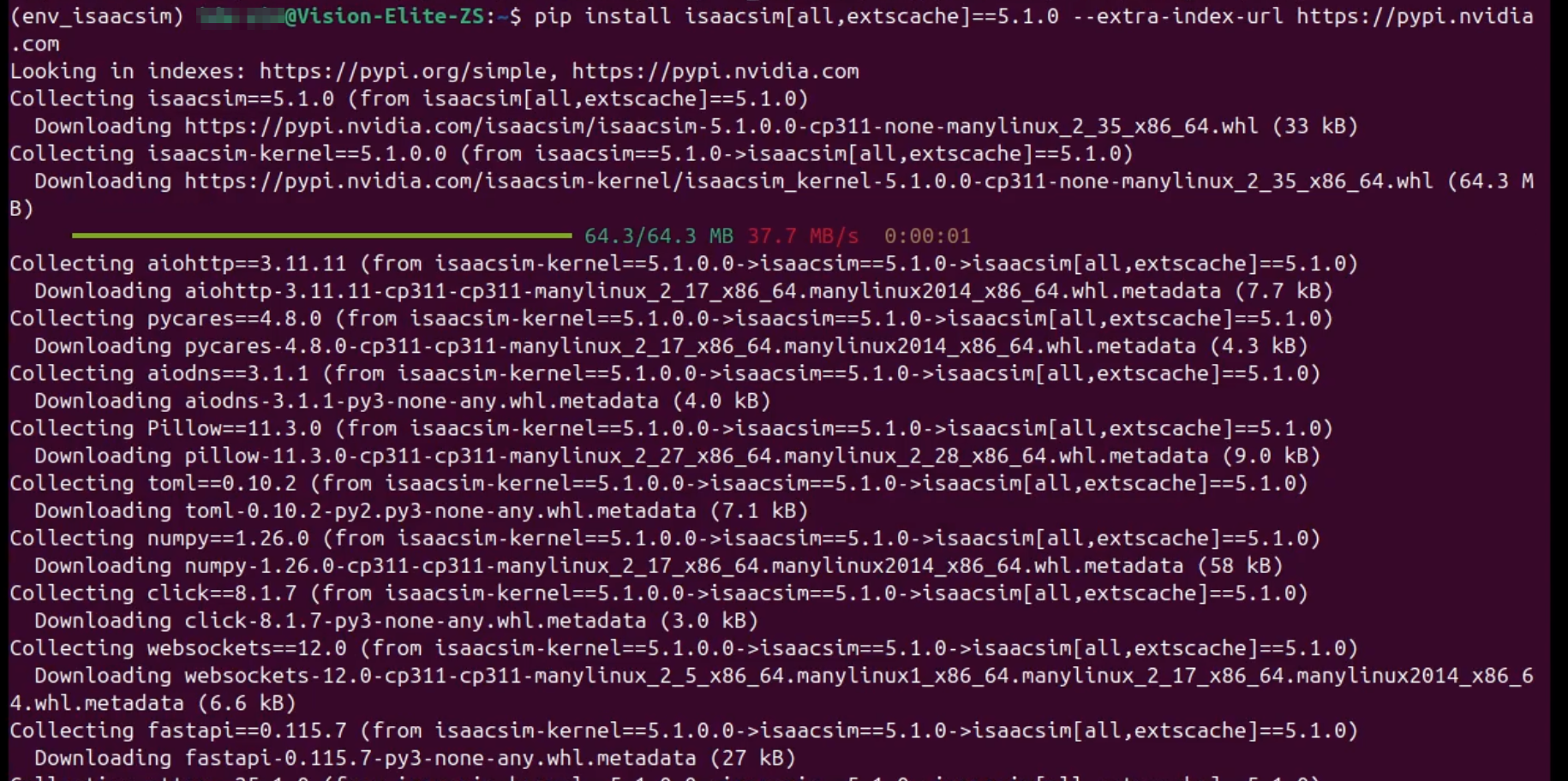
作成したconda環境内にIsaac Simをインストールします。
(env_isaacsim) $ pip install isaacsim[all,extscache]==5.1.0 --extra-index-url https://pypi.nvidia.com
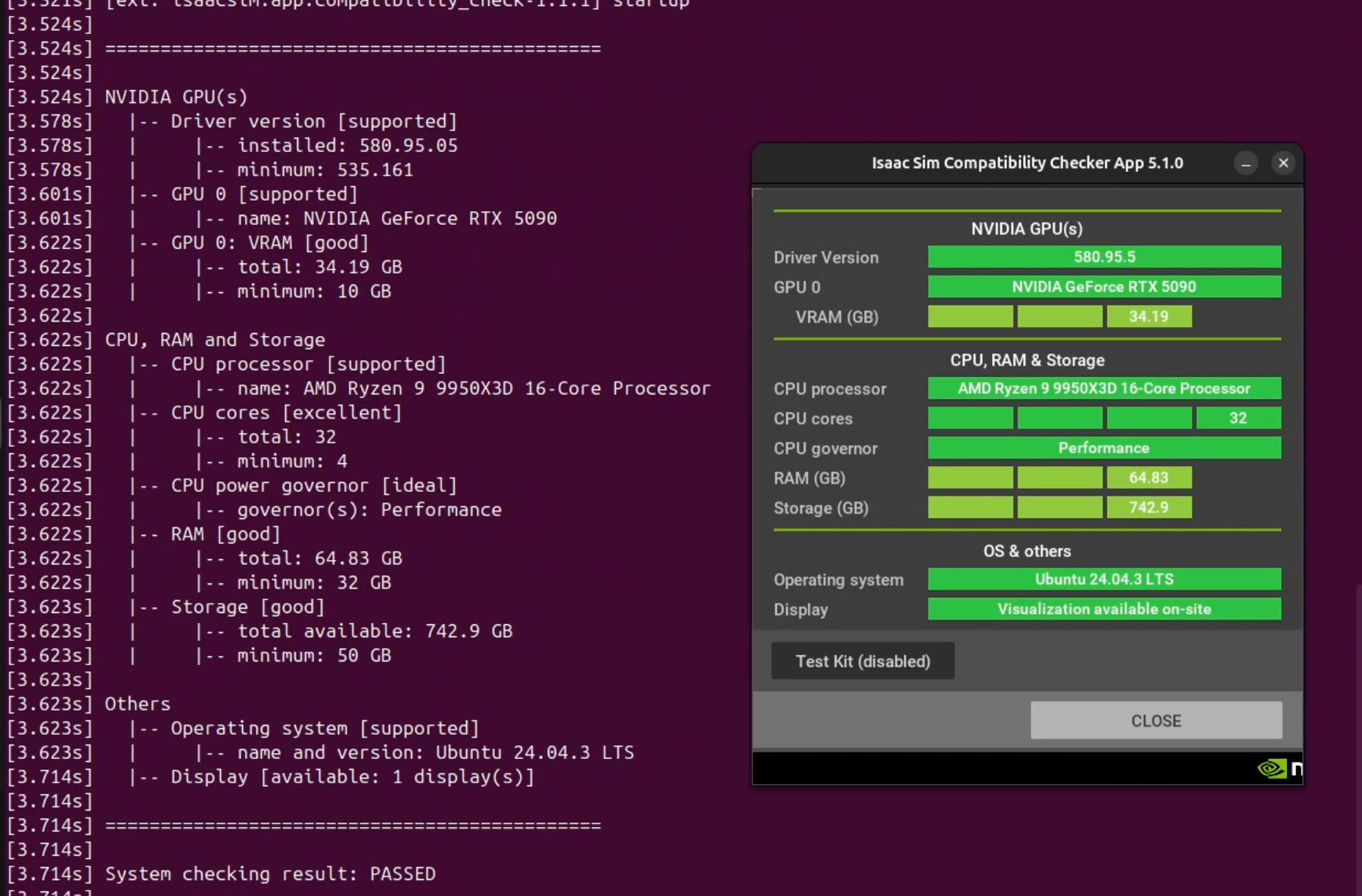
3.4. 環境確認
互換性チェックを実行し、インストールが正しく完了したかを確認します。
(env_isaacsim) $ isaacsim isaacsim.exp.compatibility_check
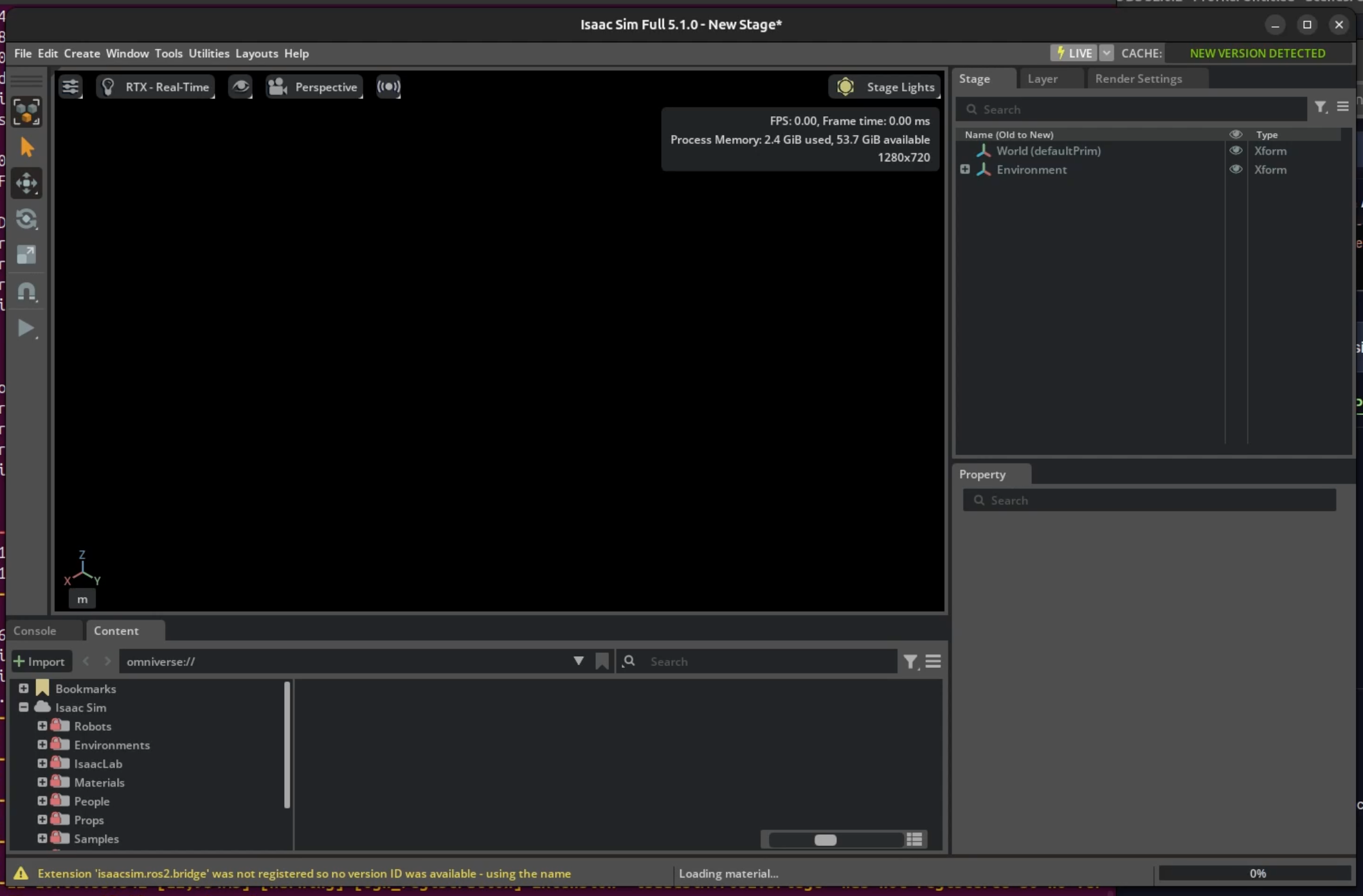
3.5. Isaac Sim起動
(env_isaacsim) $ isaacsim
3.6. ROS 2 Jazzyのインストール
公式ドキュメント (https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html) を参照し、ROS 2をインストールします。
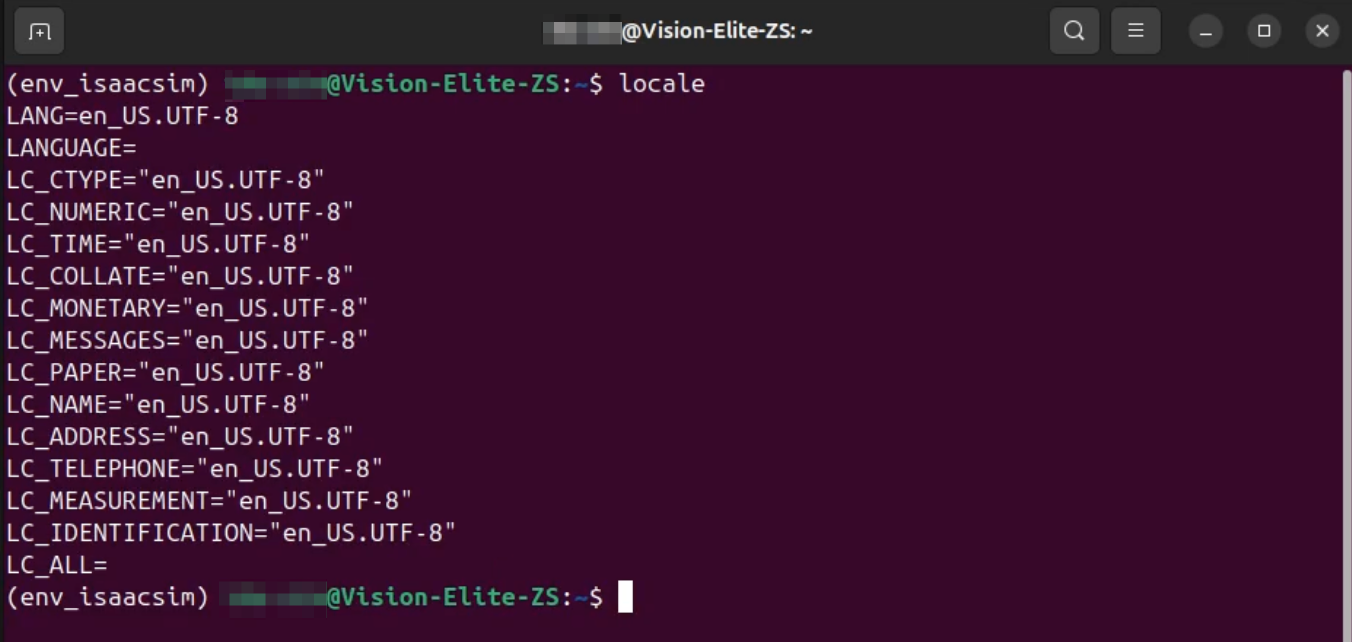
1. ロケール確認
$ locale
en_US.UTF-8が設定されていることを確認します。
2. リポジトリ設定とインストール
ROS2 Jazzyをインストールするための公式リポジトリを登録し、実際にパッケージをインストールしていきました。
$ sudo apt install software-properties-common
$ sudo add-apt-repository universe
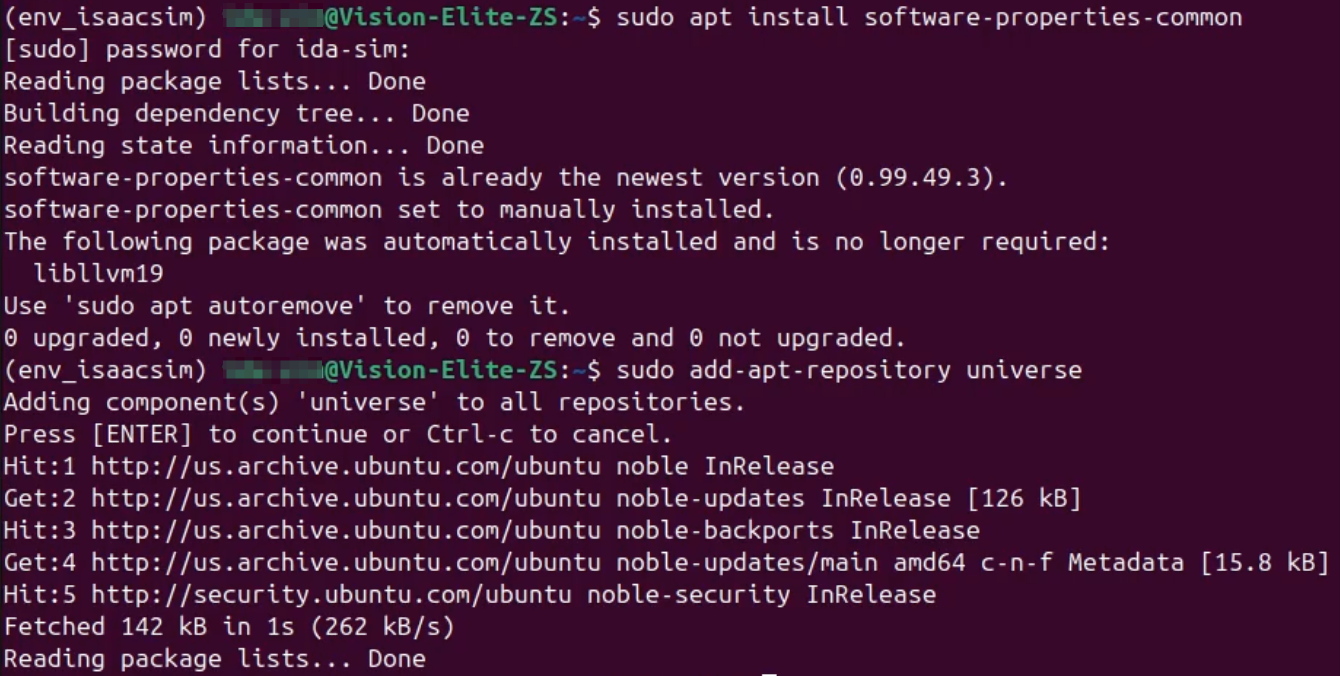
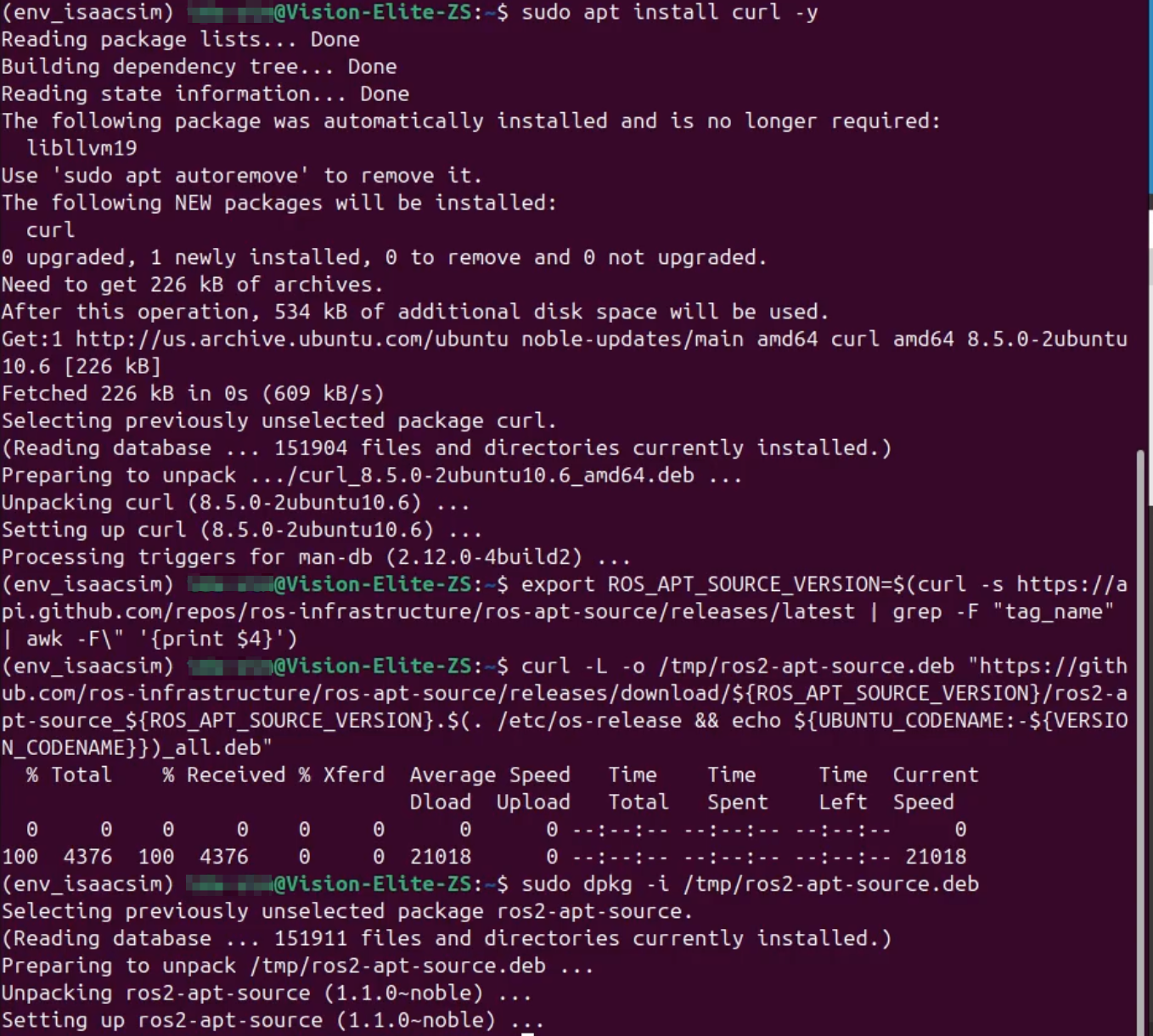
$ sudo apt update && sudo apt install curl -y
$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
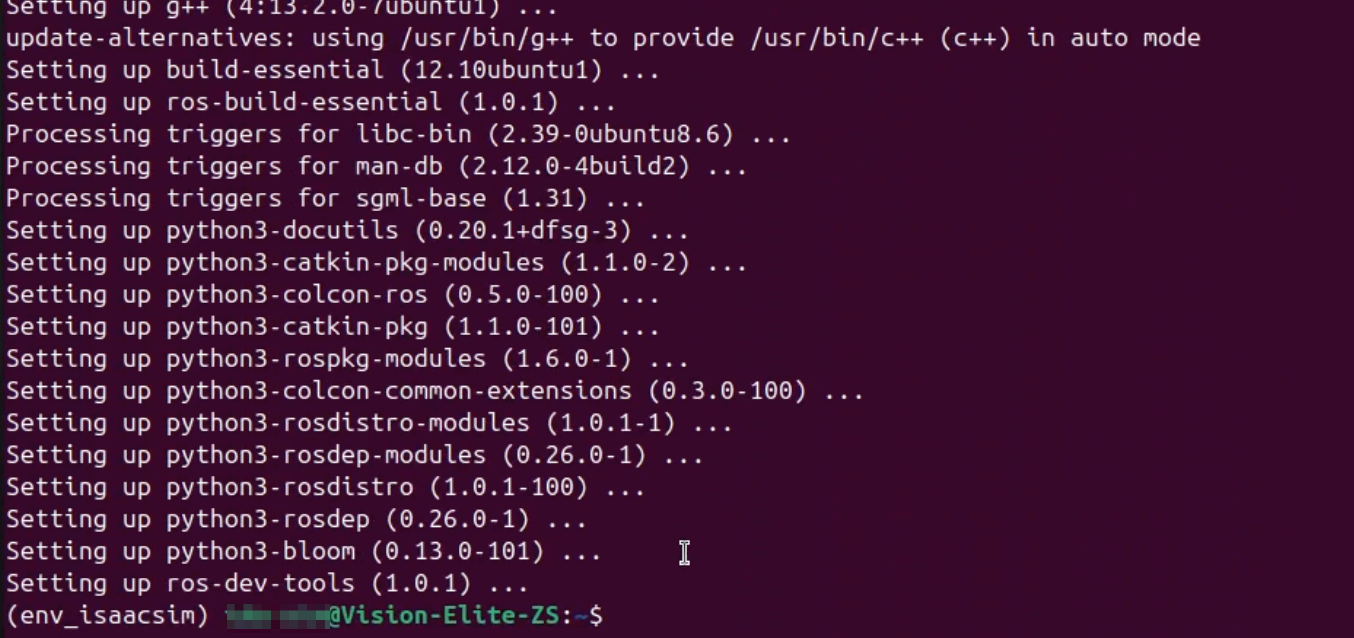
$ sudo apt update && sudo apt install ros2-dev-tools
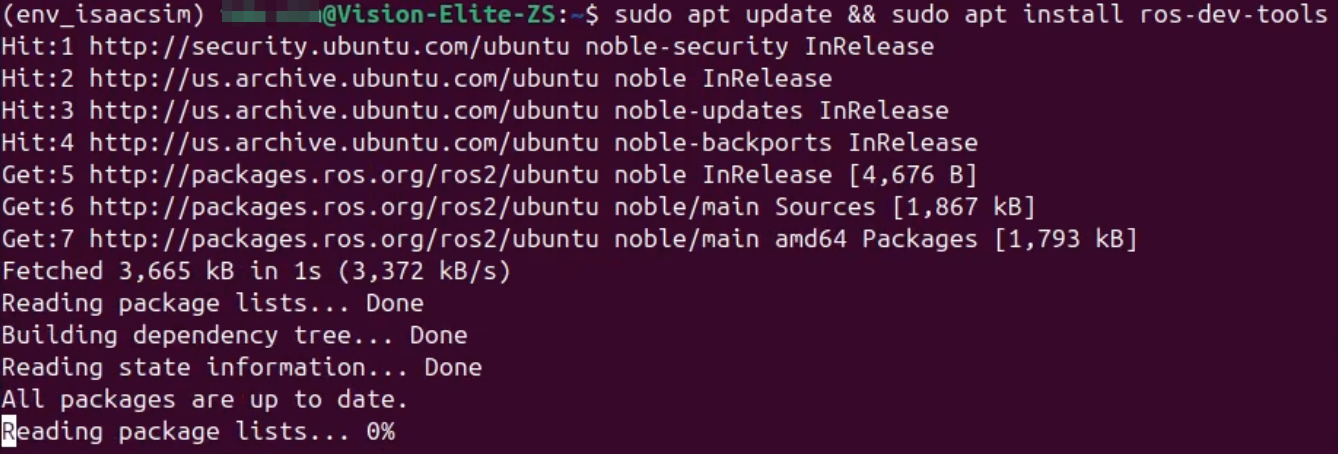
$ sudo apt update
$ sudo apt upgrade
$ sudo apt install ros-jazzy-desktop
最後のコマンドで、ROS2 Jazzyの「デスクトップ版」 を一括インストールしました。これにはROSの基本機能に加え、RViz(3D可視化ツール)やデモパッケージなど、GUI開発に必要なものがすべて含まれています。
3. 動作確認
ターミナルを2つ開き、それぞれでTalkerとListenerを起動してメッセージ通信が行われることを確認します。
# ターミナル1
$ source /opt/ros/jazzy/setup.bash
$ ros2 run demo_nodes_cpp talker
# ターミナル2
$ source /opt/ros/jazzy/setup.bash
$ ros2 run demo_nodes_py listener

3.7. Isaac SimとROS 2の連携
連携に必要なROS 2パッケージをインストールし、Isaac Simを起動します。(https://docs.isaacsim.omniverse.nvidia.com/5.1.0/installation/install_ros.html#install-ros-2)を参照しました。
$ sudo apt install ros-jazzy-vision-msgs
$ sudo apt install ros-jazzy-ackermann-msgs
# ROS 2環境を読み込んでからIsaac Simを起動
$ source /opt/ros/jazzy/setup.bash
$ isaacsim
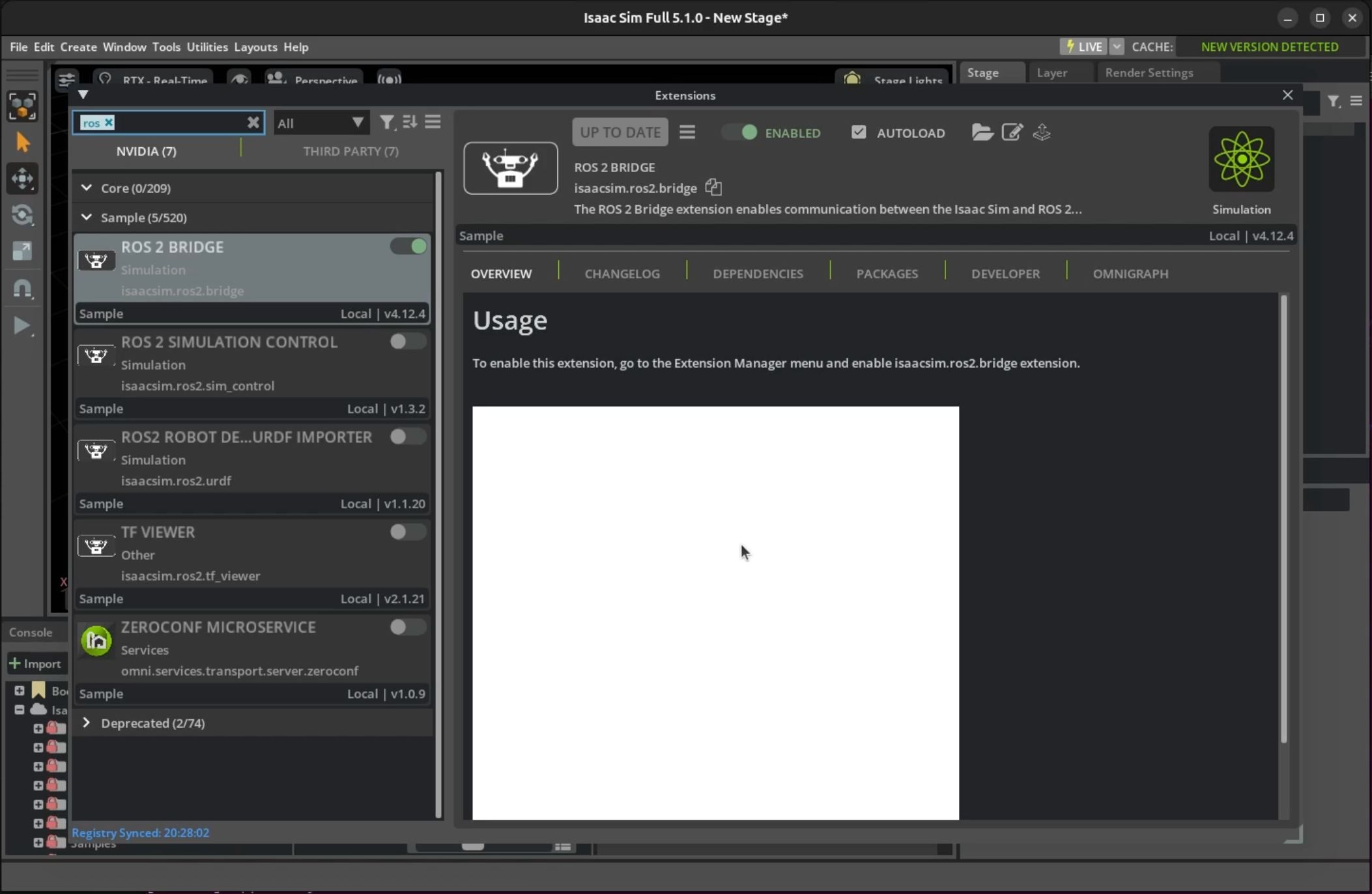
Isaac Simの起動後、ExtensionsウィンドウでROS 2 Bridgeが有効になっていることを確認すれば、連携設定は完了です。
Isaac Sim でのロボット検証・PoC構築をご検討の方へ
この記事のような環境構築から、実際のロボット(TM Robot・カスタムアーム等)を使った Pick & Place PoC の設計・実装 までをサポートしています。
4週間・固定価格($15,000〜$18,000) のクイックスタートパッケージもご用意しています。CADデータ(STEP/STL)があればすぐに始められます。
4. まとめ
以上が、デュアルブートUbuntu環境でNVIDIA Isaac Sim環境を再構築した手順です。
Windows環境でのROS2とIsaac Simのブリッジは、非常に複雑でデリケートなDLL競合の問題に直面し続けてしまったので、一つ一つエラーを解消するよりもUbuntuに切り替えました。今のところとても安定しているので、当分はUbuntu側で開発を進めていきたいと思います。